|
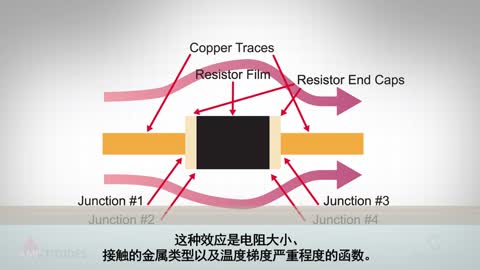
BMP測量 加速器束流測量系統是加速器調試和運行的重要診斷手段,利用束流測量系統進行各種束流參數的測量為機器研究和完善提供了重要依據,人們常稱之為加速器的“眼睛”。主要的測量有:束流位置測量(BPM)、工作點測量、束團長度測量、束流流強測量等。其中束流位置是加速器的重要參數之一,測量束流位置的最基本的方法是耦合出束流的電磁場。由于束流是一個電流,所以它產生電場和磁場。在高能束流的情況下,這些場是純橫電磁場(TEM)。如果束流偏離真空室中心,則耦合出束流的電磁場將被調制,由此可以得到束流位置信息。 通常,人們采用探測電極測量束流的電磁場。探測電極的感應信號是被束流調制的時域信號,其載波是束團的回旋頻率(對單束團而言)或高頻的RF頻率(對多束團而言)。傳統的束流位置探測電極是一對電極或兩對電極(在同時測量水平和垂直位置時)。 圖1為具有束流的束流位置檢測器和真空室示意圖。為了分析方便,我們采用極坐標表示。這里,表示電極上某點的位置,表示束流的位置, 為真空室半徑,b為電極到真空室中心的距離。 圖1 具有束流的束流位置檢測器和真空室示意圖 圖2 鈕扣電極的感應電壓波形 設計 從安裝在真空管道內的四個紐扣電極感應出的信號的波形如圖2所示。 這個信號的脈寬很小,為ns數量級,其頻譜很寬,能達到幾個GHz。 整個設計的方框圖如圖3所示。 圖3 對數比處理電路的方框圖 這里所顯示的只是一個方向的位置測量。BPM需要測量兩個方向的位置,即水平和垂直方向的位置,兩個方向的電路結構是完全一樣的。 在此用TI公司的對數放大器LOG101來實現。LOG101具有高精度(0.01% FSO Over 5 Decades),寬動態范圍(100pA~3.5mA),低靜態電流(1mA),寬供電范圍(±4.5V~±18V)等特點。因為束流可能會工作在低流強,高流強情況下,所以要求寬的動態范圍,當然精度也是越高越好。 這里將從BPM來的R信號送入LOG101的1引腳,作為I1,L信號送入8引腳,作為I2,加上一些附加電路,就可實現對數運算了。 在此用TI公司的對數放大器LOG101來實現。LOG101具有高精度(0.01% FSO Over 5 Decades),寬動態范圍(100pA~3.5mA),低靜態電流(1mA),寬供電范圍(±4.5V~±18V)等特點。因為束流可能會工作在低流強,高流強情況下,所以要求寬的動態范圍,當然精度也是越高越好。 系統標定 為了測量束流的絕對位置,必須知道BPM的四個電極的電中心與BPM的機械幾何中心的關系。因此,在把BPM 安裝在加速器的真空管道上前,必須對每個BPM 進行標定,以得到BPM上的電壓值與位置之間的對應關系。 圖4示出束流位置監測器標定系統的結構圖。 圖4 束流位置監測器標定系統的結構圖 通過一定范圍內移動天線或拉直絲模擬束流位置移動(X,Y),并根據測量的信號電極(V1, V2, V3, V4)計算出水平和垂直位置信號(U,V)值,這樣可以得到BPM的Mapping圖。 圖5示出束流位置監測器標定系統得到的BPM的Mapping圖。 圖5 BPM的Mapping圖 BPM是加速器束流測量中的重要一項,并直接影響到其他一些物理量的測量,由于對數比方法的種種優點,使它的應用很廣泛。這里就是用TI的LOG101對數放大器來實現對數比方法的。 |