|
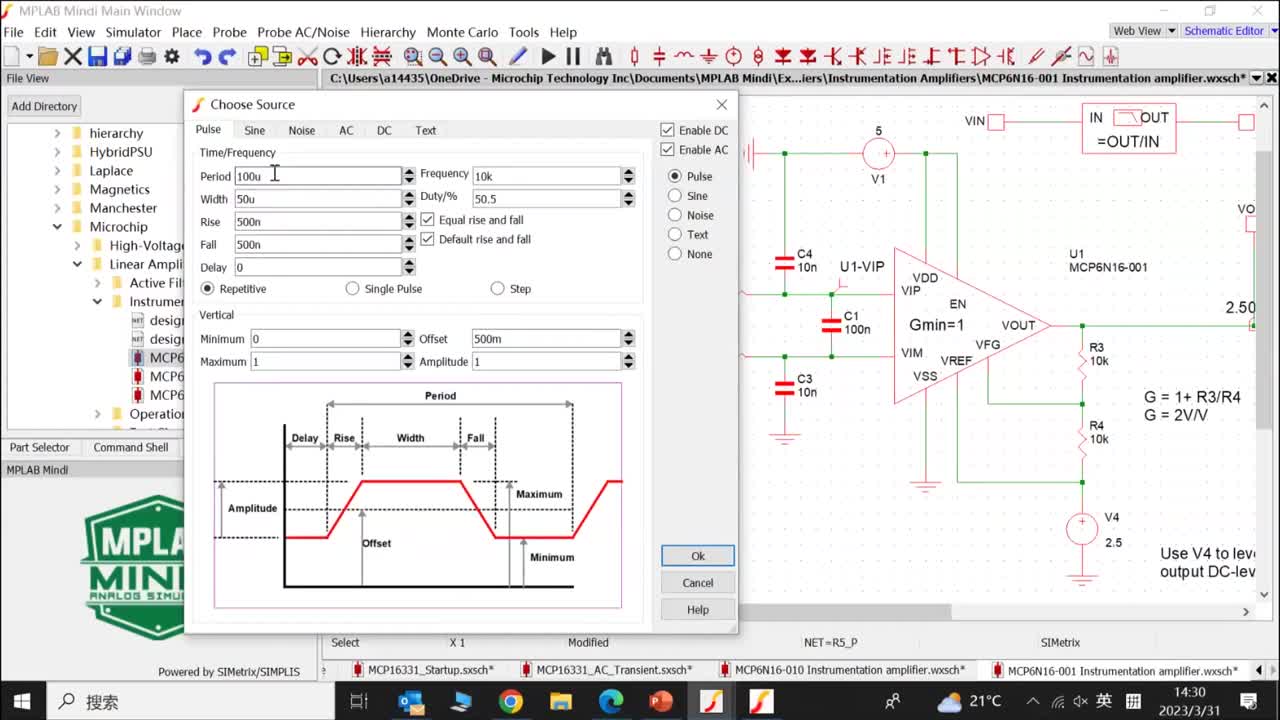
ժҪ���ں��ν�Bij��(d��o)���Һ�ŷ��C(j��)��(g��u)�Ļ��A(ch��)�ϣ�Ԕ��(x��)�U���˻���ARM�������b��Ӳ������ģ�K�O(sh��)Ӌ(j��)������ܛ���O(sh��)Ӌ(j��)˼·�͌�(sh��)�F(xi��n)�����ͨ�^ԇ�(y��n)����ԓ�b�����ܷ�(w��n)���ɿ�����(sh��)���ԏ�(qi��ng)������ͨ늕r(sh��)�g���ƣ�����ˌ�(d��o)���Һ�ŷ��C(j��)��(g��u)�Ľ̌W(xu��)��Ӗ(x��n)��Ч���� ���� �Һ�ŷ��C(j��)��(g��u)���錧(d��o)������ϵ�y(t��ng)�Ĉ�(zh��)�ЙC(j��)��(g��u)���V�����ڸ��N��̖�ď���ʽ��(d��o)���ϣ�����푑�(y��ng)�ٶȺ;���ֱ��Ӱ푌�(d��o)�������о��ȡ������Һ�ŷ��C(j��)��(g��u)�@��һ��(g��)�Y(ji��)��(g��u)��(f��)�s��Ҫ���ܵ������b�䣬��Ҫ�·��Һ·�͚�·����֪�R(sh��)�����ڜyԇ�^�����Ї�(y��n)���ͨ늕r(sh��)�g���ơ�Ŀǰ�����Ӳ��(du��)Ӗ(x��n)����܊��ԺУ�̌W(xu��)�У�������ͨ늕r(sh��)�g���ޣ��Һ�ŷ��C(j��)��(g��u)ֻ���������֡��DƬ���������̵Ą�(d��ng)����ʾ�����ڍ�λ�����ܲ���Ӗ(x��n)����Ҳ�o���M�㡰��(sh��)�(sh��)Ӗ(x��n)���Ľ̌W(xu��)Ӗ(x��n)�������b�����̖�֟o��ֱ�^�w�(y��n)�Һ�ŷ��C(j��)��(g��u)��(n��i)���������B�ӷ�ʽ�����^�̣���������̖���b�䱾����ԭ������J(r��n)֪���ɞ�ԺУ��Փ�̌W(xu��)�c���(du��)����Ӗ(x��n)����ƿ�i�� 1 �Һ�ŷ��C(j��)��(g��u)ԭ������ ij��(d��o)���Һ�ŷ��C(j��)��(g��u)�M�ɽY(ji��)��(g��u)��D��D1��ʾ�������ŷ��Ŵ������D(zhu��n)�Q�Ŵ���(�Һ�ŷ��y)��Һ����(zh��)��Ԫ���������y��Ԫ����Һ��Դ�ȽM�ɡ� �ŷ��Ŵ������nj�ָ��늉��ͷ���늉���̖���^���D(zhu��n)׃?y��u)�ɱ����?a href="http://m.4huy16.com/keyword/���" target="_blank" class="relatedlink">����������Һ�ŷ��y�������_(d��)�����_���Ƶ�Ŀ��; �Һ�ŷ��y�����D(zhu��n)�Q�ͷŴ�Ԫ���������ŷ��Ŵ����Ŵ������̖�D(zhu��n)�Q��Һ����̖(����������)ݔ�������Թ��ʷŴ�; Һ����(zh��)��Ԫ������ϵ�y(t��ng)�ڹ������܄�(d��ng)���͌�(sh��)�F(xi��n)�����D(zhu��n)����Ԫ���� ��������(d��ng)Ͳݔ�����Һ���ͣ�ݔ������λ�ƺ�����;�����y��Ԫ�����ǜy��ϵ�y(t��ng)��ݔ���������D(zhu��n)���ɷ�����̖���뵽ϵ�y(t��ng)��ݔ��ˣ��cָ����̖�M(j��n)�б��^ݔ�����γɷ���?zh��n)��ã����Cϵ�y(t��ng)��(w��n)���ԡ��ɿ��ԡ����_�ԡ� 2 Ӳ���O(sh��)Ӌ(j��)�c��(sh��)�F(xi��n) ����(j��)ij��(d��o)���Һ�ŷ��C(j��)��(g��u)ԭ�������b�õĿ��w����Ҫ���ڱ��C�c��(sh��)�b�����^��һ�µĻ��A(ch��)�ϣ��Y(ji��)��ԓ��(d��o)���Һ�ŷ��C(j��)��(g��u)����yԇ�����c(di��n)����ԭ���������^������Ԅ�(d��ng)���Ƽ��g(sh��)�����ܙz�y���g(sh��)���������M(j��n)��ARMǶ��ʽӋ(j��)��C(j��)ϵ�y(t��ng)����D2��ʾ�� �ɈD2���Կ�������(d��o)���Һ�ŷ��C(j��)��(g��u)����ϵ�y(t��ng)������Դ��·�Ϳ��ƻ�·��������Դ��·�������ṩ�㶨�������������Һ���������|(zh��)�������ƻ�·�Ĺ������C���ã�����ҪԪ������ֱ��늄�(d��ng)�C(j��)�������á������������䡢�������T������ȾԪ�����^�d���o(h��)Ԫ���Ͳ���Ԫ���ȡ����ƻ�·���ŷ�����ϵ�y(t��ng)�ĺ��ģ����ŷ�����ϵ�y(t��ng)��(sh��)�F(xi��n)���Ƶ��P(gu��n)�I����Ҫ���ŷ��Ŵ������Һ�ŷ��y������(d��ng)���ͷ����λӋ(j��)�M�ɣ����������ṩ������̖��ʹ��Դ��·����(y��ng)��(d��ng)������ͨ�^������·������Դ��·�Ą�(d��ng)�����ԙz�y���Ķ��Д�����(g��)ϵ�y(t��ng)�Ƿ���������A(y��)�ڵ��΄�(w��)�� ����늚������Ķ����m��(y��ng)�ԣ�������������M(j��n)�з����y���Լ���̖�Ŵ����̖�����������룬��һ���棬Һ����(zh��)������ݔ�����ʴY(ji��)��(g��u)�o���������(d��ng)��Ԫ��ʮ�ֺ��m����һ��늚�������Һ��Ԫ���ĽM���У�����Ҫһ��(g��)Ԫ�������B�Ӄ��ߵĘ������ڿ���ϵ�y(t��ng)�У��@�N�D(zhu��n)������һ��(g��)�Һ�ŷ��y����ɵģ��ŷ��y��С���ʵ����̖�D(zhu��n)׃?y��u)��y���\(y��n)��(d��ng)��Ȼ���y���\(y��n)��(d��ng)��ȥ��������Һ����(zh��)�����������͉����� �����·�O(sh��)Ӌ(j��)��ȡ���ܷ����O(sh��)Ӌ(j��)��ʹ��Ƕ��ʽARMӋ(j��)��C(j��)��(g��u)�ɿ���ϵ�y(t��ng)��Ӳ��������Ҫ������ARMӋ(j��)��C(j��)���ӿ�ģ�K���(q��)��(d��ng)�塢���O(sh��)���·�Ȳ��֡���ȡ�ֲ�ʽ���Ʒ�ʽ����ARMӋ(j��)��C(j��)����ģ���ϸ�ӿڔU(ku��)չ�壬��(sh��)�F(xi��n)�����̖�IJɼ��c���ơ�ϵ�y(t��ng)������Ʋ�ȡ���칤�I(y��)���Ƽ��g(sh��)���C�ϸ�ϵ�y(t��ng)��������y(t��ng)һ�O(sh��)Ӌ(j��)����������ϵ�y(t��ng)���ܽӿڰ壬��I/O��A/D����(sh��)�a���(q��)��(d��ng)��늙C(j��)���ơ��������ƵȽӿڰ壬����(j��)�O(sh��)����Ҫ��(d��)���O(sh��)Ӌ(j��)�������(q��)��(d��ng)����Ҫ�M�㲿���·�������Ĺ���Ҫ�����ڲ���Ӌ(j��)��C(j��)�M(j��n)�з�����ƣ�����ӿ�ģ�K��Ҫ��ɕr(sh��)����ơ��_�P(gu��n)�����ơ���̖�ɼ����ƽ�D(zhu��n)�Q�ȣ������Y(ji��)��(g��u)��D3��ʾ�� �ŷ��C(j��)��(g��u)�����·���ܷ���ģ�K��Ҫ���Ì���ӿڹ��ܷ��棬������ij��(d��o)���Һ�ŷ��C(j��)��(g��u)����ϵ�y(t��ng)������ɼ��g(sh��)ꇵ��Һ�ŷ��C(j��)��(g��u)��≺�������扺����Һ���͜ضșz�y����Ҫ�΄�(w��)���٬F(xi��n)ij��(d��o)���Һ�ŷ��C(j��)��(g��u)��Ԫ�yԇ��(zh��n)�������е�Ҫ�c(di��n)�h(hu��n)��(ji��);ͨ�^ij��(d��o)���Һ�ŷ��C(j��)��(g��u)����ܛ�����yԇ���̣��o��(d��o)���Һ�ŷ��C(j��)��(g��u)�����b��������N�yԇָ�ģ�M������(j��)ָ����ͼ��yԇ�M(j��n)�̣�������N�F(xi��n)����������@ʾ���N��B(t��i)��Ϣ����(d��o)���Һ�ŷ��C(j��)��(g��u)����ϵ�y(t��ng)���������D4��ʾ�� Ƕ��ʽARMӋ(j��)��C(j��)�C��̎�����Һ�ŷ��C(j��)��(g��u)�����O(sh��)��l(f��)���ĸ��N������Ϣ�����M(j��n)�з��̎����һ���挢������Ϣ�l(f��)�͵�����O(sh��)��̎��ģ�K��ʹ�����·�����f(xi��)�{(di��o)һ�£���(sh��)�F(xi��n)��Ϣͬ�������c����;��һ���挢̎����Ϣ�ς����̌W(xu��)ϵ�y(t��ng)�K�ˣ��M(j��n)�ж�ý�w�̌W(xu��)����(d��ng)��Ӗ(x��n)���O(ji��n)���c������Ƕ��ʽARMӋ(j��)��C(j��)ģ�K�c��λ�C(j��)�ĽM�ϽY(ji��)��(g��u)�D��D5��ʾ�����ģ�K��Ҫ��ɸ��O(sh��)���x���Ĺ��ܷ��棬���ܪ�(d��)����������ͨ�^�����Y(ji��)��(g��u)���cͨ��Ӌ(j��)��C(j��)���M(j��n)����Ϣ���Q�����Cϵ�y(t��ng)��ͬ���f(xi��)�{(di��o)�� ��(d��o)���Һ�ŷ��C(j��)��(g��u)ԭ�������b��ͨ�^���������cģ�M�����yԇͬ��ˢ�¹��ܵ��·��Һ·�͚�·ԭ��ܛ����ʾϵ�y(t��ng)�����ô���ͨ�Ņf(xi��)�h�����ղ���������匍(sh��)�r(sh��)�l(f��)�͵�ģ�M����Ӳ���ӿ���Ϣ������(d��ng)����(y��ng)�Ĝyԇԭ���(d��ng)�B(t��i)�@ʾģ�K����(sh��)�F(xi��n)�yԇԭ���Č�(sh��)�r(sh��)��(d��ng)�B(t��i)�̌W(xu��)����ֱ�^�������չʾ�Һ�ŷ��C(j��)��(g��u)�������Y(ji��)��(g��u)���B���P(gu��n)ϵ�������w��Ϲ�����r��������̖���J(r��n)֪�b��Y(ji��)��(g��u)���ԭ�����գ������^�õ�֧�κͱ������á� ��(d��o)���Һ�ŷ��C(j��)��(g��u)ԭ�������b�õ�Ӳ���O(sh��)Ӌ(j��)�C�ϲ��ù�늸��x��늴����Ρ���(sh��)�֞V����ܛ�����e(cu��)�ȼ��g(sh��)����(sh��)�F(xi��n)�����·��ģ�K����ͨ�û��O(sh��)Ӌ(j��)���������ϵ�y(t��ng)�Ŀ��ɔ_���������Cϵ�y(t��ng)�\(y��n)�еĸ߿ɿ��ԡ�ͨ�^�x�ù��I(y��)��Һ��Ԫ������늄�(d��ng)Һ����Դ�����b�ú��Һ�ŷ�����(d��ng)�������b�ã�ͨ�^��Һ����·�B�Ӹ�Һ��ϵ�y(t��ng)��ͨ�^��������O(sh��)Ӌ(j��)��(sh��)�F(xi��n)�ŷ��C(j��)��(g��u)��Ԫ�yԇ��(sh��)���h(hu��n)��(ji��)���棬��K��(sh��)�F(xi��n)�Һ�ŷ��C(j��)��(g��u)ԭ�����档 3 ܛ���O(sh��)Ӌ(j��)�c��(sh��)�F(xi��n) ϵ�y(t��ng)ܛ����Ҫ��������ܛ��������ܛ�����әC(j��)����ܛ����ͨ��ܛ����̓�M����ܛ�����̌W(xu��)ܛ���ȡ�����߾���Ч�ʣ�������ģ�K���O(sh��)Ӌ(j��)����D6��ʾ�� ϵ�y(t��ng)ܛ������ϵ�y(t��ng)ʹ�õ�Ӌ(j��)��C(j��)�o���yԇܛ����C�Z���ͽM�B(t��i)ܛ����C�Z����Windows����ϵ�y(t��ng)�²��H���к�(qi��ng)�ĈD��̎�����ܣ������܌�I/O�ӿڵĔ�(sh��)��(j��)�M(j��n)�п��ٵ��x����߀����ֱ�ӿ���Ӌ(j��)��C(j��)�Ľӿڣ��\(y��n)���ٶȿ죬�m�ڄ�(d��ng)�B(t��i)����ԇ�(y��n)�����M�B(t��i)ܛ�����н���ֱ�^�Ͳ�����������c(di��n)���m���M(j��n)�и��NҺ��Ԫ���ķ�(w��n)�B(t��i)����ԇ�(y��n)�� ����ܛ������Ҫ�M(j��n)�в����^�̺Ϳ���߉�ķ��棬���س��������(y��ng)��Ӳ���·����ϣ���ɲ���Ӗ(x��n)���^���и��N�_�P(gu��n)���IJɼ��������Дࡢݔ�����ƣ��DZ��C����ģ�Mϵ�y(t��ng)���������ĺ���ܛ������_������Ч�ʣ������{(di��o)ԇ�ģ��������������ģ�K���O(sh��)Ӌ(j��)�����֞飺�ˆ�ģ�K����(sh��)��(j��)�ɼ�ģ�K��߉�\(y��n)���c�Д�ģ�K���_�P(gu��n)��ݔ��ģ�K��ģ�M���\(y��n)��ģ�K�ʹ�ӡݔ��ģ�K�ȣ���ģ�K֮�g���Ô�(sh��)��(j��)��ϵ���ʽ��ͨ�^�����ӿ��M(j��n)�Д�(sh��)��(j��)��ݔ���څf(xi��)�{(di��o)ϵ�y(t��ng)��������r�£���Ч���Cϵ�y(t��ng)�\(y��n)���ٶȡ�������(g��)�����^���У���(hu��)����(j��)�Ñ��IJ����Ԅ�(d��ng)�ڸ��@ʾ�������D(zhu��n)��������(sh��)��(j��)�M(j��n)���Ԅ�(d��ng)���x���F(xi��n)��B(t��i)���c�挍(sh��)����һ�¡�����@ȡ�IJ���߉�c�Ѵ惦(ch��)��߉����һ�£�ϵ�y(t��ng)��(hu��)�˞��Ñ��M(j��n)�����`������ֹͣӲ���F(xi��n)����ƣ����Р�B(t��i)�֏�(f��)��ʼֵ������ܛ������o���Ñ���ʾ���ˆ����Һ�ŷ��C(j��)��(g��u)����ϵ�y(t��ng)�M(j��n)���˙C(j��)��������Ҫ���棬�ˆ��ṩ���N�yԇ�(xi��ng)Ŀ�x�����˳�Ҳ���ɲˆ��x����Ƶġ��¼�̎�����ֲ���߉ԭ�����棬���e(cu��)�`��������һ�������e(cu��)�ԣ����C��ϵ�y(t��ng)�ڲ������e(cu��)��r�²���(hu��)���F(xi��n)�����F(xi��n)�������������̈D��D7��ʾ�� ͨ��ܛ������Ҫ�M��Ӌ(j��)��C(j��)�cӋ(j��)��C(j��)֮�g��Ӌ(j��)��C(j��)�c��Ƭ�C(j��)֮�g�Լ��W(w��ng)�j(lu��)ͨ��Ҫ��ϵ�y(t��ng)��ͨӍ��ʽ��Ҫ������̫�W(w��ng)ͨӍ��RS232���ڃɷN��͡����O(sh��)Ӌ(j��)�r(sh��)��ͬ�r(sh��)���]��̖λӲ��푑�(y��ng)�ٶȵIJ�ͬ����RS232���چΪ�(d��)�_�پ��̣���(d��ng)��Ҫ푑�(y��ng)�r(sh��)����ί�еķ��������M(j��n)�̰l(f��)��Ո���ԅf(xi��)�{(di��o)��ͬ��푑�(y��ng)�ٶȲ���ֹ����˨���� �����\��ܛ�������O(sh��)���Ӳ����ܛ���϶��й����O(sh��)�ù��ܣ��팍(sh��)�F(xi��n)ܛ��Ӳ��һ�w���Ĺ����O(sh��)�ü�����ϵ�y(t��ng)��Ӳ���O(sh��)�������й����O(sh��)���_�P(gu��n)��ܛ���Ͻ������ώ죬�Á�Ӗ(x��n)������̖�ַ������ų�һ����ϵ����������ѷ������ų����ϵijɿ�ӛ䛣�����Ӗ(x��n)��������ϵ�y(t��ng)��ԭʼ��(sh��)��(j��)����̖���u�������ȼ��ṩ����(j��)�� ҕ������ܛ�������˷���̌W(xu��)Ӗ(x��n)�����Һ�ŷ��C(j��)��(g��u)ԭ������ϵ�y(t��ng)�����˸��O(sh��)���3Dģ�ͺ�ϵ�y(t��ng)�Ĺ���ԭ����ʾ��(d��ng)��������̓�M�F(xi��n)��(sh��)���g(sh��)����̓�M��(d��ng)����3Dģ����ʽ��(sh��)�F(xi��n)��(d��o)���Һ�ŷ��C(j��)��(g��u)ϵ�y(t��ng)���棬�جF(xi��n)��(d��o)���Һ�ŷ��C(j��)��(g��u)ϵ�y(t��ng)����ȫ�^�̣�ʹ��Ӗ(x��n)�ˆT��ֱ�^���˽�yԇ�^���е��O(sh��)���B(t��i)׃����r�����a(b��)ģ�M�����挍(sh��)�в���(qi��ng)�IJ��㡣 4 �Y(ji��)���Z �������ƵČ�(d��o)���Һ�ŷ��C(j��)��(g��u)ԭ�������b�þC���\(y��n)�ìF(xi��n)�����Ƽ��g(sh��)���C(j��)�һ�w�����g(sh��)��ҕ�����漼�g(sh��)�����ϵ�y(t��ng)��Ӳ��ƽ�_(t��i)�������˻��ڌ�(sh��)�wԪ����̓�Mҕ����Y(ji��)�ϵď�(f��)�s�b�����������ģ�͡�ϵ�y(t��ng)������ij��(d��o)���Һ�ŷ��C(j��)��(g��u)����yԇ�Ľ̌W(xu��)�cӖ(x��n)�����ܣ��܉���ɏ�(f��)�s�b�����^�Y(ji��)��(g��u)չʾ�������^����ʾ������ԭ��W(xu��)��(x��)�����Ϸ����ų��ȿ�Ŀ����Q�ˌ�(d��o)���Һ�ŷ��C(j��)��(g��u)Ԫ������J(r��n)֪���Y(ji��)��(g��u)��(f��)�s�y�ڲ�⡢�����^���漰�C(j��)�Һһ�w���y�ڷ�����y�}���،��ˌ�(d��o)��������(f��)�s�b��ģ�ͷ������˼·�� ԓ��(d��o)���Һ�ŷ��C(j��)��(g��u)ԭ�������b�üȿɴ��挍(sh��)�b�M(j��n)�з�ϵ�y(t��ng)�̌W(xu��)Ӗ(x��n)�����ֿ��M(j��n)�в������̵Ľ̌W(xu��)Ӗ(x��n)����߀�܉��M(j��n)�к��εĹ��Ϸ����ų��̌W(xu��)Ӗ(x��n)�������p���ˌ�(d��o)�����(du��)���Ì�(sh��)��(zh��n)�b��Ӗ(x��n)���ĴΔ�(sh��)�������˽̌W(xu��)Ӗ(x��n)���M(f��i)�ã����C�˽̌W(xu��)Ӗ(x��n)���r(sh��)�g������ˌ�(d��o)�����(du��)�Ľ̌W(xu��)Ӗ(x��n)��Ч�������ܻ��Ӳ��(du��)�����P(gu��n)ԺУ�Ěgӭ�� �����īI(xi��n)�� [1]����.ij��̖��(d��o)���T�M�^�����yԇ�x������[J].��Ӯa(ch��n)Ʒ����,2012(2)  41-43 41-43[2]����.��̖��|�^���yԇ���о�[J].�F��ͨ����̖,2013(7):17-19 [3]��(qu��n)��.�\(y��n)�d���늚�ϵ�y(t��ng)������|�W(w��ng)�Ԅ�(d��ng)��(d��o)ͨ�^���yԇ�x���O(sh��)Ӌ(j��)[J].����y�����g(sh��),2014(10):37-40 [4]��ռ��.��Ӝy���x��ԭ���cʹ��[M].��ӹ��I(y��)������,2006:364-373 [5]������.���ڹ����ϵ��͉��^���yԇϵ�y(t��ng)�O(sh��)Ӌ(j��)[J].����O(sh��)Ӌ(j��)����,2014��(4):15-18 [6]�K��܊.��yʽ��|�yԇ�x���O(sh��)Ӌ(j��)[J].Ӌ(j��)��C(j��)�y���c����,2006(11):1585-1588 |