|
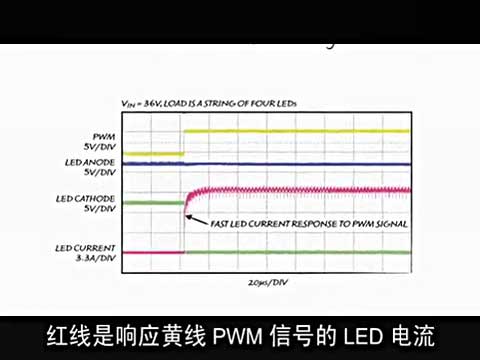
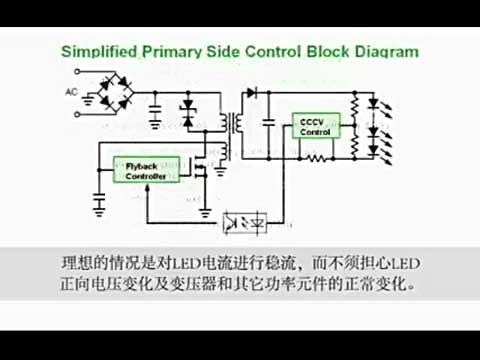
1������ SAA1064��PHILIPS��˾���a(ch��n)��4λLED�(q��)��(d��ng)�������p�O���·�����нӿڡ�ԓ�·���e���(q��)��(d��ng)4λ����С��(sh��)�c(di��n)���߶��@ʾ�����O(sh��)Ӌ(j��)�ģ�ͨ�^(gu��)��·�_(k��i)�P(gu��n)�Ɍ�(du��)�ɂ�(g��)2λ�@ʾ���M(j��n)���ГQ�@ʾ��ԓ������(n��i)�����������İl(f��)�ͽ�����������ͨ�^(gu��)��ַ���_ADR��ݔ���ƽ���̞�4��(g��)��ͬ�ď�������ַ����(n��i)����ģʽ���������Կ���LED�ĸ���(g��)λ��ʹ���܉������o�B(t��i)ģʽ����(d��ng)�B(t��i)ģʽ��Ϩ��ģʽ���Μy(c��)ԇģʽ�� 2�����_���ܼ����b��ʽ SAA1064����24�_DIP��SOT�ɷN���b��ʽ���D1��ʾ��24�_DIP���b�����_���С�����Ҫ���_�Ĺ������£� ADR��1������ַݔ�뾀�� ��2������(n��i)����ʎ�����ݔ��ˣ�����ֵ��2.7nF�� P8��P1(3��10)���Δ�(sh��)��(j��)ݔ����1�� P9��P16(15��22)���Δ�(sh��)��(j��)ݔ����2�� MX1��11������·�x���_(k��i)�P(gu��n)ݔ��1�� MX2��14������·�x���_(k��i)�P(gu��n)ݔ��2�� ��12�����أ� ��13�����Դ�� SDA��23�����������Д�(sh��)��(j��)���� SCL��24�����������Еr(sh��)犾��� 3�������f(shu��)�� 3��1 ͨӍҎ(gu��)�s ������CPUͨ�^(gu��)������(du��)SAA1064�M(j��n)���x��?q��)����x/��(xi��)��ʽ�п����ϵ���Ϣ����ʽ��D2��ʾ���D�У�S�醢��(d��ng)��̖(h��o)��P��Y(ji��)����̖(h��o)��A��푑�(y��ng)λ��X������ֵ��A1A0��ADRݔ���λ�_��2λ��ַλ��SC SB SA���Ԫ��ַλ��C6��C0�����λ  R����늏�(f��)λ��(bi��o)־�� R����늏�(f��)λ��(bi��o)־�� 3.2 SAA1064�ďĵ�ַ SAA1064�ďĵ�ַ�������_ADR�ϵ�ݔ���ƽ?j��ng)Q���ġ�ADR���_�ڽӡ�3/8��5/8�͕r(sh��)�քe��(du��)��(y��ng)��4��(g��)��ͬ�ďĵ�ַ��A1A0=00��01��10��11�����ڌ�(xi��)��ʽ�r(sh��)��������(du��)��(y��ng)�ďĵ�ַ�ֹ�(ji��)ֵ��70H��72H��74H��76H�������x��ʽ�r(sh��)��������(du��)��(y��ng)�ďĵ�ַ�ֹ�(ji��)ֵ��71H��73H��75H��77H�������ĵ�ַ����ԓ������푑�(y��ng)�� 3.3 ��B(t��i)�ֹ�(ji��) SAA1064�Ġ�B(t��i)�ֹ�(ji��)��ֻ��1λ������늏�(f��)λ��(bi��o)־λPR������߉��1���r(sh��)����ʾ���ϴ��x��B(t��i)�Ժ���F(xi��n)�^(gu��)��늺ͼ�늣������x��B(t��i)�ֹ�(ji��)��������Ժ�ԓ��(bi��o)־��0�� 3.4 ��Ԫ��ַ ��λSC��SB��SA�γ�1��(g��)ָ��Դ_��ָ���ֹ�(ji��)�Ժ�Ĕ�(sh��)��(j��)�ֹ�(ji��)��(xi��)���Ă�(g��)�Ĵ������������Ĕ�(sh��)��(j��)���Ό�(xi��)����^��Ԫ�У��@�N���ԷQ(ch��ng)���Ԫ��ַ��������Ԫ��ַָ�?l��)����?��7����Ԫ��ַ�������1���С� 3.5 �����ֹ�(ji��) �����ֹ�(ji��)��λ��C0��C6���ĺ��x���£� C0=0 �o�B(t��i)�@ʾ����(sh��)��λ1��2�����B�m(x��)�@ʾ�� C0=1��(d��ng)�B(t��i)�@ʾ����(sh��)��λ1��3��2��4�����@ʾ�� C1=0/1��(sh��)��λ1��3��/���x��λ�� C2=0/1��(sh��)��λ2��4��/���x��λ�� C3=1 ���жΌ�(d��o)ͨ�Ա�Μy(c��)ԇ���������C4��C5��C6���Q���� C4=1 ��ݔ���������3mA�� C5=1 ��ݔ���������6mA�� C6=1 ��ݔ���������12mA�� 3.6 ��(sh��)��(j��)�ֹ�(ji��) ��(sh��)��(j��)�ֹ�(ji��)�Д�(sh��)��(j��)��1�r(sh��)�錦(du��)��(y��ng)�ĶΌ�(d��o)ͨ����������(sh��)��(j��)�ֹ�(ji��)D17��D10��D27��D20��D37��D30��D47��D40�քe��(du��)��(y��ng)��λ1��2��3��4���@ʾ������λ��(du��)��(y��ng)��ݔ����P8��P16����λ��(du��)��(y��ng)��ݔ����P1��P9���@ʾ��1��4�@ʾ�Ĕ�(sh��)��(j��)��(du��)��(y��ng)�چ�Ԫ��ַ1��4�ă�(n��i)�ݡ� 3.7 SDA��SCL SDA��SCL�քe�鿂���Ĕ�(sh��)��(j��)���͕r(sh��)犾������ֹ�@Щ���_�ϳ��F(xi��n)�^(gu��)���}�_����(y��ng)��һ��(g��)��(w��n)���ܣ�5.5V�������������ľ�늉�����(y��ng)���^(gu��)5.5V��������r�£���(sh��)��(j��)��푑�(y��ng)λ�ĕr(sh��)�����׃�i�档 3.8 ��늏�(f��)λ ��늏�(f��)λ��̖(h��o)����SAA1064оƬ�ă�(n��i)���a(ch��n)���ģ�ԓ��̖(h��o)��ʹ��(n��i)����λ��0���@ʾȫ�����˕r(sh��)ֻ�е�늘�(bi��o)־��λ�� 3.9 �ⲿ���r(sh��)������� ��SAA1064�����_��2�_���Ͻ�һ��(g��)���r(sh��)��ݵ��ؿ�ʹ��(n��i)����·�D(zhu��n)�Q����ʎ�����������o�B(t��i)������ʽ�У���?y��n)鲻��Ҫ��ʎ����������ˣ�ԓ���_�ɽӻա� 3.10 �Δ�(sh��)��(j��)ݔ���� P1��P16����������ɿصĶΔ�(sh��)��(j��)ݔ���ˣ���������(y��ng)�Ĕ�(sh��)��λ�����䌧(d��o)ͨ������C4��C5��C6����λ����������Ĵ�С�� 3.11 ��·ݔ���� SAA1064�Ķ�·ݔ����MX1��MX2�ڄ�(d��ng)�B(t��i)�@ʾ��ʽ�н��挧(d��o)ͨ���������Ƀ�(n��i)���r(sh��)犵ķ��l��̖(h��o)�(q��)��(d��ng)�����o�B(t��i)��ʽ�У�MX1���nj�(d��o)ͨ����ݔ���Ƀ�(n��i)����O���S���M�ɣ���ֱ���(q��)��(d��ng)2λ�@ʾ���Ĺ����O��������^(gu��)���·�Ŀ����ģ���(y��ng)��(d��ng)�þ��w�ܰ�11�_��14�_���B��һ�� 4.���͑�(y��ng)�� �D3���ԣ��o����SAA1064��4λ�@ʾ������(d��ng)�B(t��i)�@ʾ���Ľӿ��·���D�е��@ʾ���鹲�(y��ng)�O�l(f��)�����O���M�ɵ��߶��@ʾ���� ���·���������Դģ�K�·����ģ�K늉������ֵ���@ʾ��Ҳ�����ڙz�y(c��)ģ�K�·���ψ�(b��o)�oCPU��늉������ֵ�c��(sh��)�Hֵ�Ƿ�һ�¡����ڿ��ƿ�������Ƭ�C(j��)�·�ķ���D��D4��ʾ�����е�80C552���w���֣�PHILIPS����˾��80C51��Ƭ�C(j��)��������256�ֹ�(ji��)RAM��(sh��)��(j��)�惦(ch��)����8·10λA/D�D(zhu��n)�Q����3��(g��)���r(sh��)��/Ӌ(j��)��(sh��)����һ��(g��)�O(ji��n)ҕ���r(sh��)�������д��п��������c(di��n)���D4�У�ģ�K�е�늉�ֵV�����ֵI��(j��ng)׃�Q������A/D�D(zhu��n)�Q�ڣ���(j��ng)�ɘӲ����ɘ�ֵ�D(zhu��n)����Δ�(sh��)��(j��)��(j��ng)��������ݔ����SAA1064�� ����SAA1064�@ʾ늉�������ij������̈D��D5���ԣ���ʾ���Ɍ�(sh��)�F(xi��n)�Ĺ��ܞ飺���λLED1�@ʾ��U�����t�����@ʾ����늉�ֵ�����@ʾ��C�����t�����@ʾ�������ֵ����3λ�@ʾ����늉�������ľ��w��(sh��)ֵ�����@ʾ��U45.0����ʾ늉�ֵ��45.0V��늉����ֵÿ��5�뽻���@ʾ���ڳ����У�늉���������@ʾ�r(sh��)�g����������Ĵ�ѭ�h(hu��n)���Ƶģ��@�ӿ����CPU�Ĺ���Ч�ʡ� �P���ь����·����48V/50Aͨ���Դģ�K�����{(di��o)ԇ���@ʾʹ�ã���(sh��)�Hʹ�ýY(ji��)��������SAA1064�c80C552��Ƭ�C(j��)�Ľӿں�(ji��n)�Σ�ʹ�÷��㣬Ч�����á� |